 手机浏览网
手机浏览网


变桨距风力机组的桨距角参考值可由风速、电机转速和发电机输出功率三个参数来独立控制,但由于风速难于精确测量,而且在整个风轮扫掠面上的风速并不相等,所以本文不用风速作为变桨控制量,而选择电机输出功率作为控制桨距角的变量。其控制策略如图3所示。
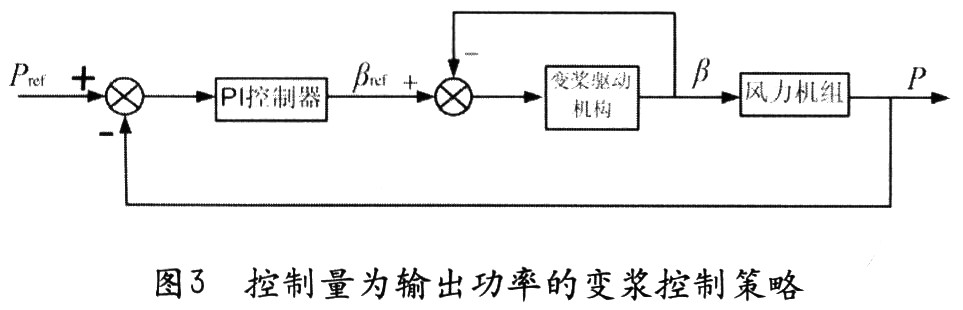
功率反馈信号和功率给定值之间的误差作为PI控制器的输入,PI控制器给出桨距角参考值βref,但是由于桨距角的变化对于风速而言是非线性的,当风速在额定值附近时,较小的风速变化也需要桨距角改变一个较大的角度才能使输出功率稳定,所以在风速超过额定不多的风速阶段,需要较大的PI控制器增益;而在超过额定风速较多的高风速段,较大的风速变化只需要一个较小的桨距角改变量就可以使输出功率稳定,所以在此风速段PI控制器的增益可以较小。所以控制器所需的增益大小和所需的桨距角基本成线性反比关系,由此提出一种由桨距角大小来调节控制器增益的控制策略,即在原有控制系统中加入一个增益调度控制器,使PI控制器的在所需桨距角较小时有较大的增益,在所需桨距角较大时有较小的增益,此增益控制器由一个多项式实现。带增益调度控制器的变桨控制框图如图4所示。
图5为变桨执行机构模型,其中由控制器给出桨矩角参考值βr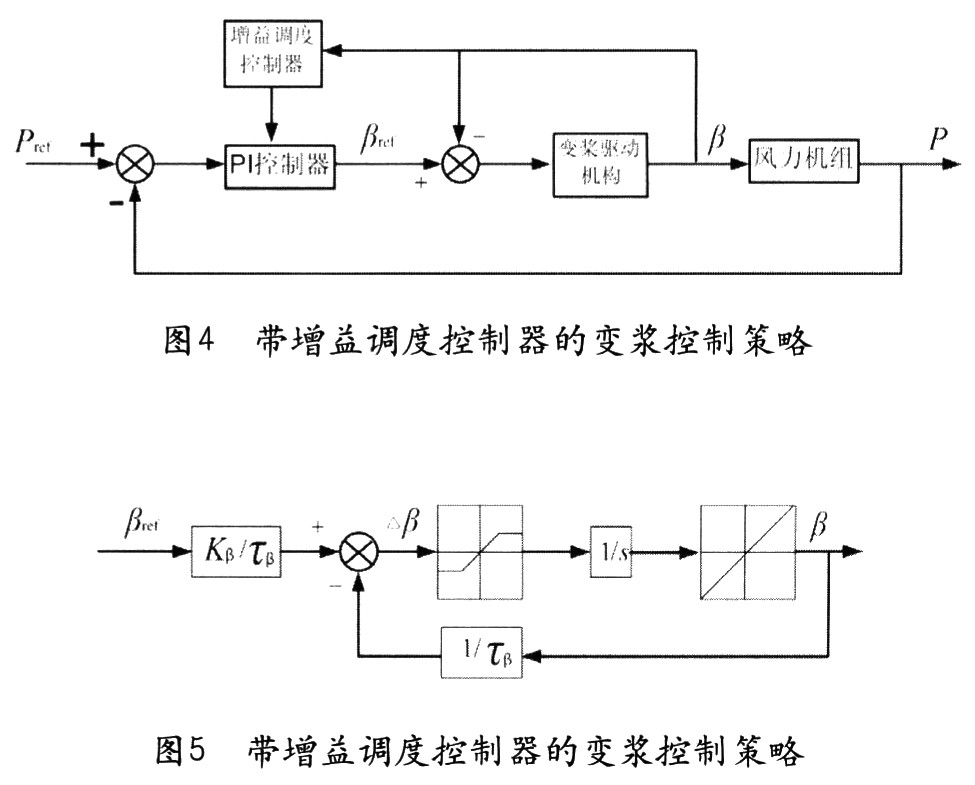 ef,并与实际β比较得出△β,通过变矩驱动机构改变桨距角。由于大容量的风机桨叶重达数吨,考虑到调节器疲劳,桨矩角的变化速率要有限制,且其角度也有限制,即其动态特性是在桨矩角和桨矩速率上都有饱和限制的非线性动态,当桨矩角和桨矩速率小于饱和限度时,桨矩动态呈线性。
ef,并与实际β比较得出△β,通过变矩驱动机构改变桨距角。由于大容量的风机桨叶重达数吨,考虑到调节器疲劳,桨矩角的变化速率要有限制,且其角度也有限制,即其动态特性是在桨矩角和桨矩速率上都有饱和限制的非线性动态,当桨矩角和桨矩速率小于饱和限度时,桨矩动态呈线性。
变桨执行机构的数学模型可以描述如下:

3 变桨控制仿真





