 手机浏览网
手机浏览网


利用振动信号直接进行模态参数识别的常用方法有Ibrahim时域法、ITD法、最小二乘复指数法、多参考点复指数法、特征系统实现法和ARMA时序分析法。本文采用ARMA时序分析法对齿轮箱振动信号进分析,进而提取系统的模态参数。在以往进行频域谱分时,常由于信号截断而引起泄露,出现旁瓣、分辨率低及信号被淹没等缺陷,而时间序列分析则与频域谱分析不同,由于时序谱是动态谱,观测数据能外延,因此不会由于观测数据的样本长度有限而产生上述缺陷。
3.3ARMA时序分析法原理
时间序列分析首先由观测数据拟合一个时序模型,然后对该模型进行分析研究,从而得出观测数据的统计特性。由于实测时间序列反映了系统工作的动态过程,因此蕴含着系统的固有特性。建立时序参数模型的目的,就是把系统本身固有的特性很好地表达出来。
N个自由度的线性系统激励与响应之间的关系可用高阶微分方程描述,在离散时间域内,该微分方程变成由一系列不同时刻的时间序列表示的差分方程,即ARMA时序模型方程:
![]()
式(1)表示响应数据序列Xt与历史值Xt-k,的关系,其中等式左边为自回归(AR)模型,右边为滑动均值(MA)模型,2N为自回归和滑动均值模型的阶次,ak、bk分别表示待识别的自回归系数和滑动均值系数,ft-k为白噪声激励。
运用ARMA时序法识别模态参数首先要估算系数ak和bk的值,本文利用Prony方法对时间序列响应进行拟合获得ARMA模型的参数(可以通过调用MATLAB中的prony函数实现)。当求得自回归系数ak和滑动均值系数bk后,通过ARMA模型传递函数的表达式计算系统的模态参数,ARMA模型的传递函数为:
![]()
用代数方程求解法计算分母多项式方程的根:
![]()
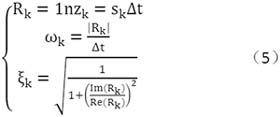
求解得到的根为传递函数的极点,他们与系统的模态频率ωk和阻尼比的关系为:

3.4模态参数提取结果
本文首先用有限元法计算了试验齿轮的前10阶固有频率,并将其作为确定实际信号带通滤波上下限的依据,然后用ARMA时序分析法对滤波后的信号进行处理,提取了不同裂纹深度的齿轮的前5阶固有频率值见表2。
表2 试验提取的固有频率值 Hz
|
模态 |
裂纹深度 |
|||
|
2mm |
3mm |
4mm |
5mm |
|
|
1 |
259 |
257 |
255 |
241 |
|
2 |
303 |
300 |
295 |
290 |
|
3 |
367 |
360 |
359 |
352 |
|
4 |
454 |
452 |
444 |
434 |
|
5 |
531 |
530 |
524 |
524 |
从表2的模态参数识别结果来看,随着裂纹深度的增加,提取到的固有频率值也会有所降低,因此将固有频率作为齿轮裂纹故障的诊断参数是可行的。
4结语
本文提出的方法避免了传统方法诊断所带来的不便之处,并且可以有效地诊断齿轮的齿根裂纹故障诊断中。对于其它类型的故障(如点蚀、磨损等)的诊断,本文也可以为其提供一个很好的参考思路和诊断方法。




