 手机浏览网
手机浏览网


软件程序设计
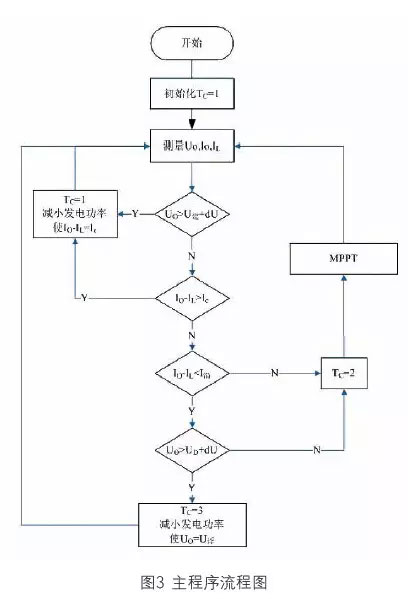
以单片机为核心的控制软件具有实时性、灵活性、通用性及运行可靠性的特点。风光互补发电系统控制是实时控制系统,这就对软件的执行速度有一定的要求,在软件程序设计中,为节约内存和保证较强的适应能力,通常要求程序要有一定的灵活性和通用性。因此,软件开发一般采用结构化程序设计方法,尽量将共用的程序编写成子程序(如系统参数设置程序、A/D转换计算程序、MPPT运算程序、减小功率子程序等),然后把子程序按一定的规则进行组合就得到完成特定任务的应用程序。本系统软件主程序流程图,见图3。

用软件来产生PWM信号,驱动IGBT工作。蓄电池电压与充放电电流检测处理程序设计思想为:若蓄电池电压高于它的上限额定电压,且充电电流低于某一个值持续了一段时间,则产生信号控制光伏系统充电控制电路,启动风电机组泄荷电路,避免蓄电池过充电。泄荷电路的驱动脉冲是PWM脉冲,蓄电池电压越高,驱动脉冲的脉宽也越宽,直到全泄荷,隔断太阳能电池为止。在软件设计的时候对A/D转换的结果进行分类计数统计平均,过压在某一段时间连续出现且充电电流低于某一个值持续了一段时间时才能全泄荷,隔断风光互补供电电路。这样有效地防止了因为干扰引起的误动作,提高了充电效率,同时保证了PWM的实时跟踪能力。




