 手机浏览网
手机浏览网


如图1所示,拉杆一端固定,另一端受外力P=10kN,拉杆长度L=400mm,横截面积A=100mm2,材料为Q235,,计算轴向变形。
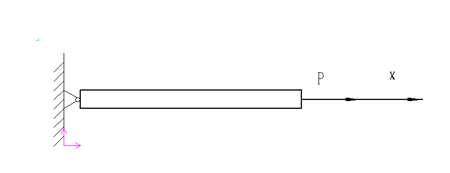
图1
根据材料力学胡克定律:
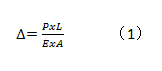
即得图1拉杆右端的位移。将公式1进行简单的移项可改写为公式2
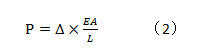
EA/L项即为单元刚度k。
下面开始推导有限元一维杆单元线性静力学典型方程,将图1轴向受拉杆划分成一个杆单元,一个杆单元分左右i、j两个节点,每个节点有一个自由度,即沿X方向的平动自由度。
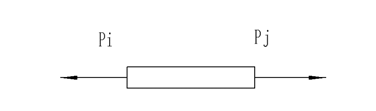
图2
由图2可知,杆左右两侧均受拉力作用,左侧Pi和右侧Pj的内力由公式2推导如下:
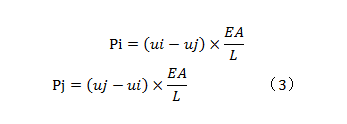
将公式(3)写成矩阵形式
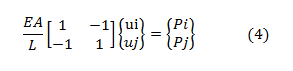
在公式4中有ui和uj两个未知量,若1个节点有1个广义未知量,1个一维杆单元包含两个节点,则1个单元共有两个广义位移未知量,最终构成的矩阵为2X2的方阵。
公式4可简写成公式5
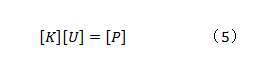
式中,

公式5即为有限元线性静力学的典型方程。
公式4仅为1个单元的静力平衡方程,若将图1的轴向受力构件划分成两个单元,则需要将两个单元平衡方程进行组装。下面就以图1的构件为例,将其划分成两个单元,计算其右侧的轴向位移。
单元划分如图3,左侧定义为1号单元,右侧定义为2号单元,共有 3个节点,3个未知位移,故最终构成的矩阵应该是3X3的方阵。
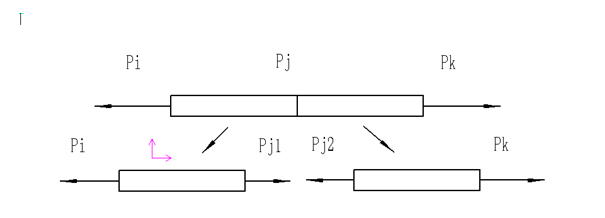
图3
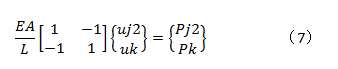
1号单元的静力平衡方程如公式7:
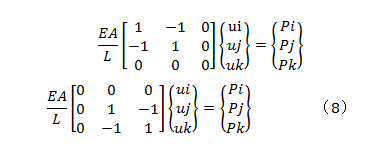
在组装矩阵之前,需要扩充公式6和公式7,扩充矩阵的目的是将3个节点的位移全部纳入到总刚矩阵中便于后面矩阵叠加,扩充后的公式6和公式7如下:
下面将扩充后的公式6和公式7合并、组装,如公式9:
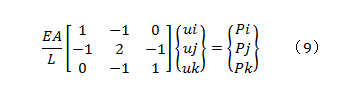
公式9中刚度矩阵K的行列式为0,无法求解图1中杆的位移,因此在使用有限元软件进行静力学分析时,由于结构约束不足,会给出报错提示。
若让式9有解,需要对式9加入边界条件,本例的边界条件是左侧i节点的轴向位移为0,即是已知的,故将式9的第一行和第一列从矩阵中去除,式9变成式10,如下式:
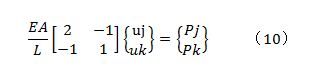
将其它已知条件(弹性模量、杆长、杆截面积及右侧集中力)带入式10:
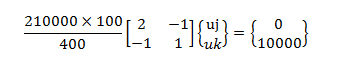
将公式10从矩阵形式改成线性方程组的形式:
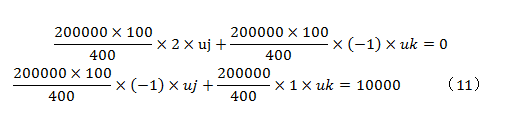
求解公式11,得

由结果可知,有限元方法求出的基本结果是位移,应变,应力场是基于位移基本解迭代出来的。
作者 李文文 高级工程师
南京安维士传动技术股份有限公司
Review



安维士联合中国船级社、南高齿以及业主单位、主机厂、齿轮箱厂等,依据多年的齿轮箱后市场维修经验,编制了齿轮箱检修技术规范并依据执行。




