 手机浏览网
手机浏览网


海上风电安装起重机按吊臂的动作方式分为两类:固定式和回转式。
固定式起重机臂架在船上的安装位置是固定的,只能通过前后变幅实现起吊重物的目的,而且吊点就位要靠船的移位实现,因此其作业效率低下,作业能力受限。

回转式起重机通过安装可旋转式基座,克服了固定式起重机不能左右移动的缺陷,不仅可以实现吊臂的前后方向移动,还可通过转台的回转,在船不移动的情况下完成吊物的横向位移,其机动性大大优于固定式起重机,特别是在船舶两舷转移吊重物时更为显著。
回转式起重机按照主体结构型式区分主要有基座式起重机、绕桩式起重机及桅柱式起重机。
基座式起重机主要通过旋转基座与船体连接,由于其重量及倾覆力矩巨大,回转支承机构大多采用滚轮式,其支柱为焊在船舶主甲板上的大直径圆筒,并从甲板延伸到船底,形成强固的船体框架和圆筒框架,便于巨大的力与力矩的传递。

与基座式起重机相比,桅柱式起重机最大的特点在于它围绕桅柱的旋转吊臂。桅柱是固定在基座上的,不再需要旋转轴承,这很大程度上降低了起重机的尾摇幅度,使起重机具有较小的空间占用率和尾摆度空间,同时可以节约甲板面积。由于桅柱式起重机是通过框架式结构与船体相连接,连接部相对简单,不需要特定的桶形基础,也不需要配重,可以降低起重机的整体重量。

绕桩式起重机为安装在海上自升式作业平台的特殊起重机,其中心可穿过平台桩腿并实现360度回转。与一般基座式起重机相比,绕桩式起重机具有“设计紧凑、自重轻、占用甲板面积小、工作高效、能力强”等明显优势。

海上风电安装起重机主要结构
海上风电安装起重机主要由基座、回转平台、人字架及吊臂等结构部件组成。
基座一般为圆筒型,用船板弯制而成,采用法兰或焊接方式固定安装于船(平台)甲板上。回转平台通过转盘轴承安装于基座上,吊臂、人字架、司机室、绞车、回转机构等安装于回转平台上,回转平台通过转盘轴承与底座实现相对转动。人字架和吊臂一般用高强度钢管焊接制作,平面桁架式结构,使外型空间挡风面积小、承风能力强、全密封的钢管适于海上工作环境。
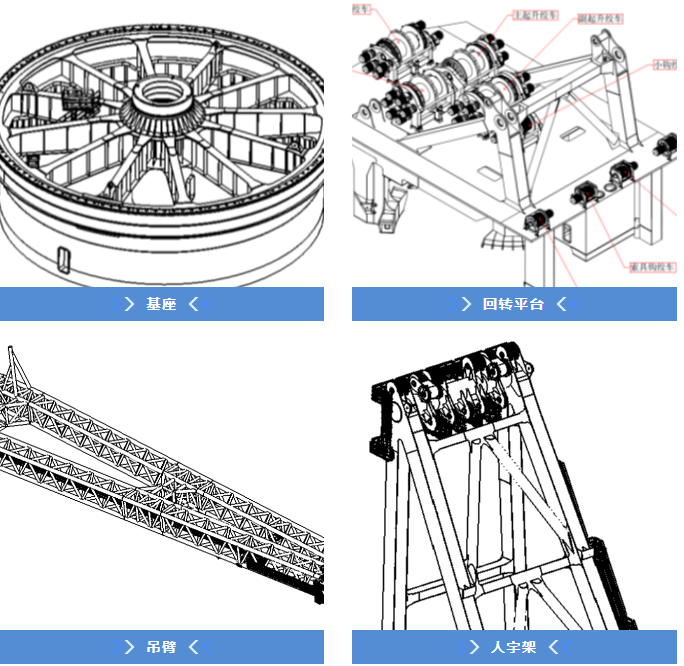
基座、回转平台、吊臂、人字架
海上风电安装起重机主要机构
起升机构。起升机构由卷筒、支架和行星减速箱组成。起升机构和液压马达(或电动机)、钢丝绳、滑轮、吊钩及其它附件等组成起重设备的起升系统。
其工作原理:由电动机或马达驱动齿轮箱转动带动绳筒转动,通过绳筒转动收紧钢丝绳,钢丝绳通过滑轮(组)拉动吊钩直线上升;反之齿轮箱输出反转使吊钩直线下降;如需要在某一位置停止,电动机或马达停止,同时制动器刹住齿轮箱输出上的轮毂而停止绳筒转动,吊钩停止在某一个需要的高度;在上升的顶部高度限定的位置,设定一个吊钩高位报警停止的限位预防吊钩和吊臂发生碰撞事故。
变幅机构。变幅机构与起升机构一样,由卷筒、支架和行星减速箱组成。变幅机构和液压马达(或电动机)、钢丝绳、滑轮及其它附件等组成起重设备的变幅系统。其工作原理为:由电动机或马达驱动齿轮箱转动带动绳筒转动,通过绳筒转动收紧钢丝绳,吊臂以吊臂转轴为中心向上旋转使吊臂上升;反之齿轮箱输出反转使吊臂下降;如需要在某一位置停止,电动机或马达停止,同时制动器刹住齿轮箱输出上的轮毂停止绳筒转动,吊臂停止在某一个需要的位置。
回转机构。回转机构是带圆盘制动器的行星齿轮减速器,由液压马达或电动机驱动,小齿轮输出(带动整机回转),即通过电动机或马达转动驱动小齿轮转动,在筒体的回转齿条上作相对运行,使吊机的上部分相对吊机筒体作相对转动而达到吊机的转旋运动。回转机构和液压马达(或电动机)、转盘支承装置等组成起重设备的回转系统。
海上风电安装起重机控制系统
海上风电安装起重机设备的控制方式主要采用液压控制及电动变频控制两种。液压控制的系统一般由动力元件(电动机或柴油机)、分动箱、柱塞泵、多路阀、液压马达、其它阀件、管路管件、接头等组成,相对电变频的控制方式,液压控制成熟程度高、制造成本及后期的维护保养较低等优势。
随着变频控制技术的不断成熟及成本的不断下降,电动变频控制也不断应用于海上起重设备,现在,海上风电起重机动力系统基本上采用电动变频控制。相对于液压控制方式,电变频控制有着绿色环保、节能、界面友好、模块程度高、后期维保方便等优点,是后续产品发展的主要方向。
作为大国重器,海上风电安装起重机是风电安装行业中的核心装备,其能力直接影响了风电设备安装工艺和效率;随着海上风电以及石油开采行业的迅猛发展,海上风电安装起重机设备及相应技术也会不断取得进步。




