 手机浏览网
手机浏览网


文 | 文茂诗,韩花丽,杨微
兆瓦级风电机组在紧急停机时,通常会采取直接断开变频器、并迅速顺桨的停机逻辑,但此逻辑将导致叶片根部以及塔筒底部承受巨大的载荷冲击,在GL2010 规范的DLC1.5、DLC1.6 工况中叶根挥舞方向弯矩、塔底前后方向弯矩就经常出现极限载荷,叶片越长该问题尤为突出。
本文采用海装某2.0MW 机组模型,以GL2010 规范的DLC1.5 工况为例,用GH Bladed 软件进行模拟仿真,对停机过程中的载荷进行分析,并提出了2 种优化的停机方案,通过仿真后与原载荷进行了对比。
数据分析
一、冲击载荷
按GL2010 规范要求,DLC1.5 工况需要考虑风电机组从切入风速到切出风速范围内,遭遇一年一遇的极端阵风(EOG1),同时要求在阵风的开始时刻、阵风的最低风速时刻、阵风的最高风速时刻以及阵风加速度最大时发生电网掉电。通常2.0MW 机组在1.2 倍额定风速附近,并在阵风加速度最大或阵风风速最大时发生电网掉电最容易产生叶片挥舞弯矩和塔底倾覆弯矩的极值,因此本文以该工况进行分析。
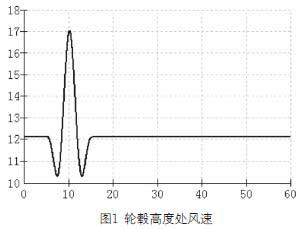
如图1、图2、图3 所示,为一DLC1.5 工况的仿真结果(横轴为时间单位s,纵轴为风速m/s 或载荷):在1.2倍的额定风速附近遭遇一年一遇的极端阵风,同时在阵风加速度最大(9s)时发生电网掉电。
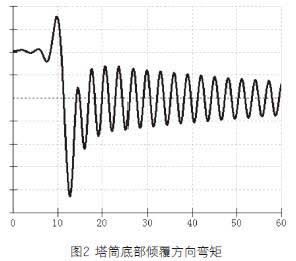
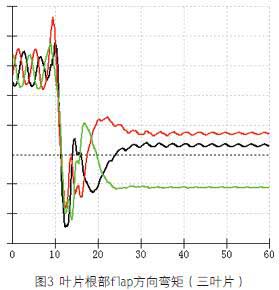
由图2、图3 可见,叶根与塔底的载荷首先随风速增加而增加;到第9s 时电网掉电,机组开始紧急停机;叶跟、塔底载荷到达极大值然后迅速下降为0,并反向增至极小值。
塔底倾覆弯矩或叶片挥舞弯矩极小值有时甚至比极大值还大。本文称此极小值为冲击载荷。
据仿真经验,电网掉电后,若叶片的顺桨速度越快或叶片越长,该冲击载荷将会越大。
二、冲击载荷产生的原因分析
(一)能量传递
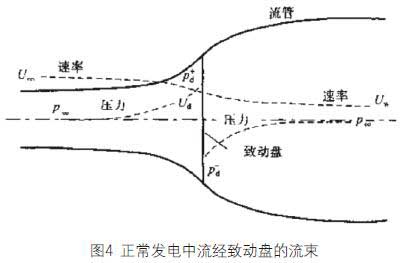
由致动盘理论可以知道,正常发电过程中致动盘吸收风能使尾流速度降低,如图4 所示,同时由动量定理可知,致动盘将尾流风速减小,因此致动盘将承受气动推力;而紧急停机过程中则相反,致动盘将释放出能量使风轮转速降低,同时风获得能量,使得尾流速度增加,此时致动盘使尾流的风速增加,因此致动盘将承受相反的推力。
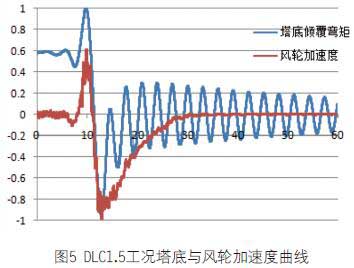
容易知道,单位时间内致动盘所释放的能量越多,风获得的能量就越多,由动量定理致动盘所受向前的推力也越大。如图5 所示为归一化处理后的塔底倾覆弯矩与风轮加速度的曲线。
可以明显的看出塔底倾覆弯矩的最小值发生在风轮减速速率最快的时刻。可以推测,冲击载荷是由风轮释放能量过快(主轴转速下降过快)引起。若通过某种手段限制风轮的加速度范围,将会改善叶跟和塔底的冲击载荷。
(二)气动特性
GH Bladed 是采用经典的叶素-动量理论并结合一定的修正方法进行气动载荷计算的。从原理可知,风轮的气动参数的Cp、Ct、Cm 主要与桨距角、叶尖速比有关。
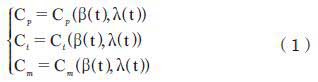
而通过GH Bladed中Performance Coefficients 功能,可以得到不同桨距角下的Cp、Ct、Cm 与λ 的曲线。可将其绘制成等高线图,如图6。
由于DLC1.5 工况是采用NWP(正常风廓线模型),因此稳态计算中获得的风轮气动参数可以近似等于DLC1.5仿真中的气动参数。
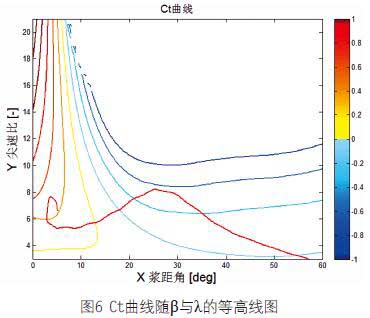
根据DLC1.5 仿真的风速、风轮转速、桨距角结果就可以近似反查到机组运行过程中风轮的推力系数Ct,如图6(红色曲线为Ct 在等高线图中的运行轨迹)、图7(紧急停机过程中的Ct 曲线)。
可以看出,紧急停机过程中,由于变频器断开机组负载迅速减小,风轮转速快速上升,导致叶尖速比增加,同时快速顺桨,导致桨距角增加过快,这使得Ct 系数快速减小为零并继续下降接近甚至超过正向的Ct 最大值,从而机组承受到很大的反向推力。
因此,发电机负载迅速降低为0、桨距角的过快增加是导致冲击载荷过大的原因。
控制优化与载荷比较
当GL2010 规范中DLC1.5 工况,塔筒倾覆弯矩、叶片挥舞弯矩的冲击载荷(或叶片摆振、扭转方向的冲击载荷)大于设计极限时,传统的做法是调节紧急停机时的顺桨速度,来减小冲击载荷。但当紧急停机的顺桨速度变慢时,又会导致叶片、塔筒正方向载荷的增加,同时风轮转速也会大幅上升带来其他隐性问题。
因此简单调节紧急停机中顺桨速度的办法,只能起到平衡正向载荷和负向载荷的作用,同时减小顺桨速度会带来更高极限风轮转速,并没有从根本上解决问题。
按前章节分析可知,要减小冲击载荷理想的方式就是限制风轮转速的下降速率(控制风轮释放能量的速度);或控制叶尖速比λ 和桨距角β 满足图6 一定的等高线关系。
据此,较为理想的控制方式是:在紧急停机的前几秒时间,结合发电机的加速度信号,通过调节桨距角,进行闭环的风轮减速控制,维持风轮的减速度的速率在一定范围以内(现国内大量的变桨系统已经可以实现,在紧急停机的前几秒依然采用主控顺桨指令的功能);或限制风轮转速,减小最大叶尖速比,以减小冲击载荷。
但由于本文的目的不在于控制器设计,因此本文以下两种简化方式进行仿真对比,以表明优化的控制效果。
一、控制尖速比λ
控制逻辑:紧急停机时使发电机转矩维持2s。(该控制方法参照国外风电整机设计公司控制策略)。
原理:防止风轮转速的迅速增加(控制最大叶尖速比λ),从而减小冲击载荷。
仿真设置:在原始的仿真中,第9s 时加入刹车(刹车扭矩等于发电机额定扭矩,刹车扭矩在2s 内从额定扭矩线性下降到0)。
二、控制桨距角β
控制逻辑:在适当时刻减小顺桨速度。
原理:在适当时刻减小顺桨速度,即减小气动刹车,防止风轮转速的迅速下降。
仿真设置:在原始的仿真中,第10s 时加入变桨速度故障,故障值为2deg/s。
紧急停机刚开始需要快速顺桨,以减小正向的载荷,而当顺桨一定角度后须减小顺桨速度以减小冲击载荷。(此处以固定时间点加入慢速顺桨为例,来说明优化效果。但实际应用还需要更为详细的控制逻辑,如:结合发电机加速度来进行顺桨速度的闭环控制。)
三、优化结果
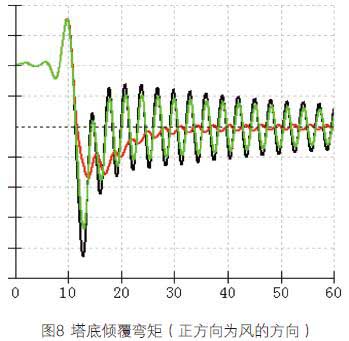
经GH Bladed 仿真后结果如图8、图9、图10。黑色为原DLC1.5 工况、绿色为λ 控制、红色为β 控制。
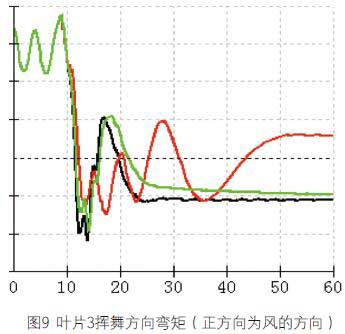
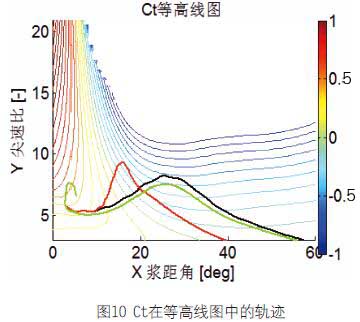
从图8、9 可以看出,通过控制尖速比λ 与控制桨距角β 的方法都可以降低冲击载荷,结合图10 可以看出,尖速比控制方法由于发电机转矩维持的作用,限制了风轮转速(尖速比)的迅速增加,从而减小了冲击载荷;而桨距角控制的方法则是避免了在高风轮转速( 尖速比) 时,出现大桨距角的情况,即避免了快速的气动刹车,从而减小了冲击载荷(见表1)。

另通过对其他坐标系检查这两种方案都不会增加其他方向的载荷,并对叶片变桨方向扭矩、摆振方向弯矩也有较为明显的降低(原理同叶片挥舞方向)。
小结
本文以海装某2.0MW 风电机组为例,对GL2010 规范DLC1.5 工况紧急停机过程中叶根和塔底出现的冲击载荷产生原因从致动盘理论的角度和叶素动量理论的角度进行了分析,并提出了控制风轮转速和控制顺桨速度两种优化的方案。通过仿真对比以上方案可有效降低紧急停机过程中叶根、塔底的冲击载荷。
(作者单位:国家海上风力发电工程技术研究中心)




