 手机浏览网
手机浏览网


成都阜特科技股份有限公司 马伟
【摘要】为解决气候问题和能源问题,风电技术的进步使得柔性塔架类风力发电机组的诞生,为满足电网调度的限电要求的同时,避免传统自适应有功控制方法对柔性塔架机组带来的批量振动停机问题,提出了基于逐台控制的有功控制方法,保证了控制的准确性和平稳性的同时,提高风能利用率。
【关键词】柔性塔架 逐台控制 风力发电机组 有功控制
1引言
气候环境问题和能源问题,一直是两个我们不可忽视的问题,也是两个相互影响的问题。目前应用最为广泛的能源依然是化石能源,化石能源的燃烧就会使气候环境变得恶劣,然而社会的发展既离不开良好气候环境,也离不开能源的供应,基于这种冲突矛盾的关系,新能源逐渐成为能源行业的新宠。目前在电力行业中,发电的形式有火电、水电、光伏、风电和核电等,其中风电对环境最为友好,所以风电越来越受国家的重视。
风电在国内刚起步阶段,单台风力发电机组装机容量普遍偏小,随着时间的推移,其缺陷也逐渐凸显,如土地利用率不高,风能未得到最大化利用,机组老化严重等。为解决这些问题,新型风力发电机组不断出现,叶片直径加长,塔筒高度增加,并出现了柔性塔架。
柔性塔架是根据风剪切效应,为捕获高空更强更稳定的风资源,而增加塔架高度,最终达到增加发电量的目的,同时能够有效降低钢材使用,从而减轻塔架的整体重量。但在实际应用过程中,柔性塔架存在致命缺点——共振频率低,传统的自适应调整[1]方式是将风场目标有功功率与实际有功功率的差值,按照每台风力发电机组的有功功率裕度之比例,进行按比例分配,该种方式会在每个有功功率调整周期来临时更新每台机组的有功功率设定值(或者发电机转速设定值),如果将此种调整方式应用到柔性塔架的风力发电机组上,当有功功率设定值(或发电机转速设定值)被设定到机组特有的共振区,机组将主动停机,以避免长期共振对机组造成的伤害,反应到整个风场,则会出现场内机组大面积脱离电网,有功功率骤降,这将非常不利于电网安全。
基于以上的分析,本文提出了一种基于逐台控制的风电场有功功率控制系统,并对控制策略进行优化,避开柔性塔架机组的共振区。
2风电场有功功率控制系统功能与设计
风电场有功功率控制系统是一套将电网调度有功功率指令转换为每台风力发电机组有功功率的系统,它能够结合风力发电机组特性以及电网调度给予的相关指令,在满足电网调度要求的前提下,最大化利用风能,为风场业主提高经济效益。系统的总体设计框架如图2-1所示。
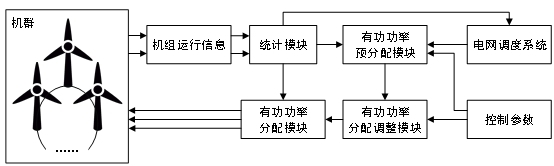
图2-1系统的总体设计框架
风电场有功功率控制系统的构成有:统计模块、有功功率预分配模块、有功功率分配调整模块、有功功率分配模块以及控制参数模块。该系统作为一个子系统集成于风场的能量管理系统中,统计模块用于收集所有风力发电机组的运行信息(如:有功功率、风速、机组状态、有功功率设定值等),并做统计运算,为分配提供原始数据支持,同时向电网调度系统上传相关运行数据,为调度系统控制提供数据依据;有功功率预分配模块根据电网调度系统所下发的目标有功控制指令和当前风场实发有功,对每台风机的发电目标进行预估;预估的结果由有功功率分配调整模块进行调整,调整依据为控制参数(如:功率调节速率、单台机组有功上下限等);有功功率分配模块是用于将分配结果下发至各台风力发电机组,在下发前还会使用从统计模块获取的实时数据再次进行核对,确认无误后,机组将收到最新控制指令,本周期控制完成。
统计模块除了收集机组的运行数据外,还会对数据进行统计运算,比如:计算全场平均风速、全场总有功功率、全场总有功功率设定、全场理论有功功率、电网调度有功指令与全场总有功功率差值、全场总有功功率1分钟变化幅度、全场总有功功率10分钟变化幅度。
有功功率预分配模块是根据电网调度的有功指令和风场实发有功,得出需要调整的量,再遍历所有机组,得出最佳分配对象,并将需要调整的量附加到最佳分配对象上。
有功功率分配调整模块,其主要作用是调整最佳分配对象上附加的调整量,其调整依据由控制参数提供,如:有功调整速率、停机时间间隔、启机时间间隔等。当预分配后的结果,不满足控制参数要求,就会对预分配值进行二次修正,可有效避免风场有功变化趋势不满足电网调度要求。
有功功率分配模块是将调整后的分配值,下发至机组,在下发前,会再次进行数据合法性判断,在确认无误后,将执行下发动作。
3风电场有功功率控制关键技术
为适应柔性塔架的风力发电机组运行特点,本文提出了逐台控制的有功分配策略。所谓逐台控制,与自适应控制最大的区别在于,自适应控制方式会在每个分配周期更新所有机组的分配值,而逐台控制方式在每个分配周期仅更新一台机组的分配值。算法流程如图3-1,其中:
Ptar表示电网调度系统向风场下发的目标有功;
Pact表示风场实际总有功;
ΔP表示目标有功和实际有功的差值;
P0表示由控制参数设置的有功死区;
Prem_1表示1号机组的有功裕度;
Pthr_1表示1号机组的理论有功;
Pact_1表示1号机组的实际有功;
Prem_max表示所有机组中有功裕度最大值;
Pact_max表示所有机组中有功最大值;
Ppar_10min表示控制参数设置的10分钟有功变化量;
P10min表示全场总有功10分钟变化幅度;
Tcyc表示一个控制周期所花费的时间;
Plim表示一个控制周期内允许的有功最大变化量;
Pset_x表示第x台机组的有功设定值;
Pact_x表示第x台机组的实际有功。
系统状态分为两种状态,即稳态和非稳态。当目标有功和实际总有功的差值的绝对值小于等于死区时,称为稳态;当目标有功和实际总有功的差值的绝对值大于死区时,称为非稳态。死区的设置是为了避免一些不必要的调控动作,频繁的调控会加重机组设备的磨损。在稳态情况下,算法无需进行调控动作,只需要持续跟踪机组数据变化;在非稳态情况下,算法都需要进行调控动作,尽最大可能将目标有功和实际总有功的差值控制回死区范围内。引起非稳态的因素有多种,如电网调度系统改变目标有功,风速波动强烈,风力发电机组因故障或其他因素导致的停机等。其中调控动作又分为升功率动作和降功率动作。目标有功大于实际总有功时,执行升功率动作;目标有功小于实际总有功时,执行降功率动作。具体的调控方法如下:
(1)电网调度系统下发的目标有功(Ptar)与风场实际总有功(Pact)计算差值,可得到ΔP(如图3-1中的过程1、过程2、过程3);
(2)如果目标有功与风场实际总有功差值的绝对值(|ΔP|)处于控制死区(P0)范围
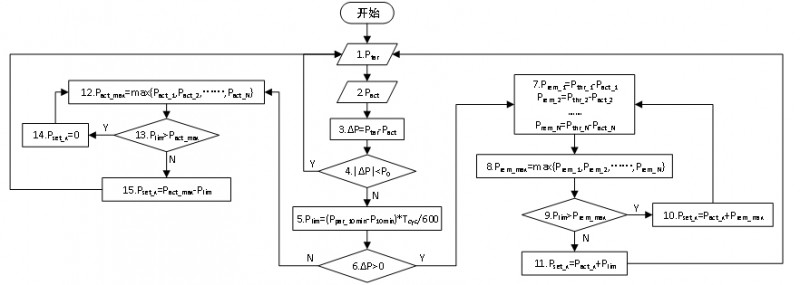
图3-1 算法流程图
内时,将不进行调控动作,算法直接返回到起始位置,以持续监测机组数据变化;否则将执行调控动作(如图3-1中的过程4);
(3)在算法对机组进行调控前,为避免风场有功变化幅度过大,需计算出本周期的最大有功变化量(Plim),计算方法为控制参数10分钟有功变化量(Ppar_10min)减去实际10分钟有功变化量(P10min),得到10分钟内的最大有功变化量,再乘以控制周期(Tcyc)除以600,可得到本次控制周期内的最大有功变化量(Plim)(如图3-1中的过程5);
(4)如果目标有功和实际有功的差值(ΔP)大于0,则执行升功率动作。在动作前,需要计算出每台机组理论有功与实际有功的差值,即有功裕度(Prem_N),再通过轮询得到裕度最大值(Prem_max),以及对应的机组x(如图3-1中的过程6、过程7、过程8);
(5)本周期有功最大变化量(Plim)如果大于裕度最大值(Prem_max),则完全放开裕度最大的机组裕度,即,将该台机组的有功设定值(Pset_x)设置为实际有功(Pact_x)与裕度(Prem_max)之和,之后再次轮询所有机组,得到新的裕度最大值,以此循环,直到本周期最大有功变化量(Plim)小于机组裕度最大值(Prem_max)时,则将机组的有功设定值(Pset_x)设置为实际有功(Pact_x)与有功最大变化量(Pact_x)之和,结束本周期控制,返回算法最开始部分(如图3-1中的过程9、过程10、过程11);
(6)如果目标有功和实际有功的差值(ΔP)小于0,则执行降功率动作。在动作前,需要轮询每台机组的实际有功,并到得实际有功最大值(Pact_max),以及对应的机组x(如图3-1中的过程6、过程12);
(7)本周期有功最大变化量(Plim)如果大于实际有功最大值(Pact_max),则直接将实际有功最大的机组停机,即,将该台机组的有功设定值(Pact_x)设置为0,之后再次轮询所有机组,得到新的实际有功最大值,以此循环,直到本周期最大有功变化量(Plim)小于机组实际有功最大值(Pact_max)时,则将机组的有功设定值(Pact_x)设置为实际有功最大值(Pact_max)与有功最大变化量(Plim)之差,结束本周期控制,返回算法最开始部分(如图3-1中的过程13、过程14、过程15)。
4仿真分析
仿真程序模拟了167台额定功率为1.5MW的风力发电机组,为尽可能验证算法的正确性,风速区间模拟了多种情况:小风阶段、起风阶段、大风阶段、风降阶段。根据Q/GDW11273-2014《风电有功功率自动控制技术规范》和Q/GDW1392-2015《风电场接入电网技术规范》要求,仿真程序模拟的装机容量达到250.5MW,故风场10分钟内有功变化不能超过50MW,1分钟内有功变化不能超过15MW。
近一个小时仿真使用的风速在3m/s至11m/s之间来回波动(如图4-1),与实际的风速情况较为接近,在该段时间内,分别进行了升功率和降功率操作(如图4-2),涵盖了实际风场中较为典型的小风期间有功出力不完全,起风期间有功提升速率超限,大风期间总有功超出目标有功等问题。
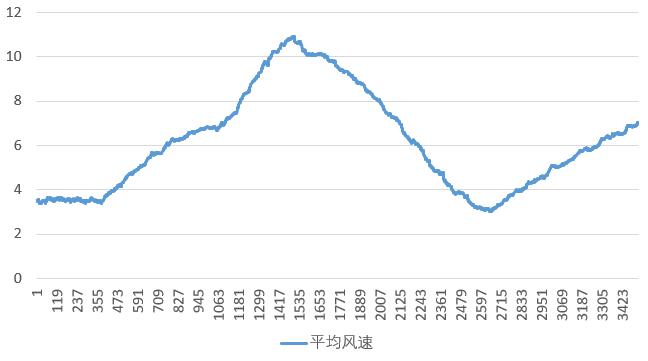
图4-1 风速变化情况
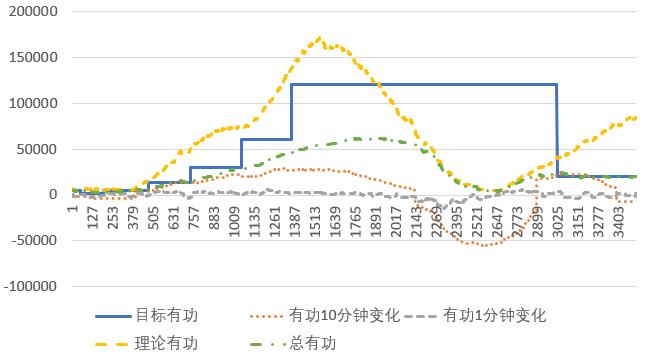
图4-2有功变化情况
在小风阶段(如图4-3,1-373秒),目标有功从5kW降至2kW,可看到总有功在经历120秒后,达到目标有功,并稳定在±200kW,期间有功1分钟变化最大值为2.2MW,有功10分钟变化最大值为3.8MW;随后在第196秒,目标有功从2kW升到5kW,经历120秒后,于316秒重新达到稳态,并在目标有功±800kW范围内波动,期间有功1分钟变化最大值为1.9MW,有功10分钟变化最大值为3.7MW。综合分析,可见不存在小风期间有功出力不完全,控制不稳定,有功变化速率超限的问题。
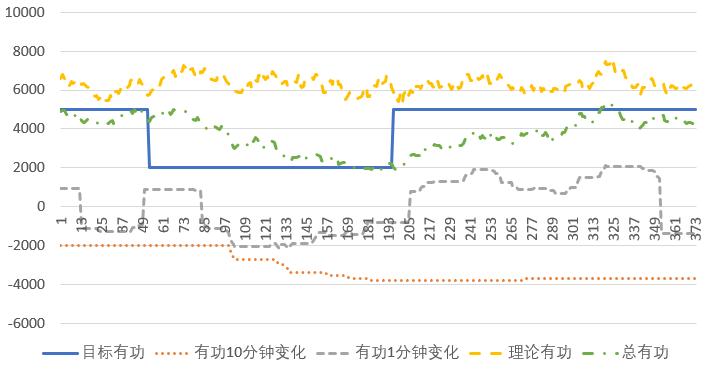
图4-3 小风阶段
在起风阶段(如图4-2,374-1366秒),风速从3.5m/s升至10m/s,期间目标有功分4次从5kW升至120MW,有功10分钟变化最大值为28.7MW,有功1分钟变化最大值为6MW。从数据可以看出,总有功上升比较平稳,未出现超发或者速率超限的问题。
在大风阶段(如图4-2,1367-1682秒),风速维持在10m/s以上,期间目标有功无变动,有功10分钟变化最大值为28.4MW,有功1分钟变化最大值为3.4MW。总有功由于未达到目标有功,依旧处于上升趋势,上升速度受限于控制参数对速率的限定,不存在有功波动过大,上升速率不稳定的问题。
在风降阶段(如图4-2,1683-2647秒),风速从10m/s降至3m/s,期间目标有功依旧无变化,从数据可以看出,总有功的下降速率要小于风速的下降速率,该现象是算法对机组当前有功进行了跟踪,在尽可能多发电的前提下,最大限度避免风降幅度过大引发的有功下降速率超限问题,也为避免在下次起风时,造成有功上升速率超限问题。
另一方面,通过机组控制记录显示,算法在每个控制周期内仅对1-5台机组进行调节,且在短期内,不会重复对某一台机组进行调节,实现了机组少动作的目的。充分验证了逐台控制方式的可行性、可靠性、准确性和稳定性(如表4-1)。

5结束语
本文研究了一套基于逐台控制的风电场有功功率控制系统及方法,并通过仿真数据验证了其在小风阶段、起风阶段、大风阶段及风降阶段的可靠性,根据数据分析出有功10分钟变化、有功1分钟变化、目标有功与总有功差值等各项指标均能满足要求,实现了对风场有功有序调节的同时,降低了弃风损失电量,极大提高了风电转换效率。
6参考文献
[1]杨滨源,马伟《基于自适应调整控制器的风电场有功功率控制系统及方法》2018-6发表于《第五届中国风电后市场专题研讨会论文集》
[2]胡凯凯,翟大勇《风电场有功功率分配策略及其实现》2013-3发表于《功率变流技术》
[3]陈宁,于继来《基于电气剖分信息的风电系统有功调度与控制》2008-4发表于《中国电机工程学报》
[4]佘慎思,曾旭《风电场有功功率控制综述》2013-3发表于《装备机械》
作者简介:马伟(1987-),男,工程师,主要从事风电监控系统和能量控制系统的设计与研发,成都,610000。




